L’intelligence incarnée, une approche bio-inspirée en robotique
S’inspirer de la nature, certainement la démarche scientifique la plus ancienne, est une approche qui a encore beaucoup à nous révéler. À IMT Atlantique, la robotique bio-inspirée est une thématique de recherche qui fait appel à cette démarche. Elle vise non pas le simple mimétisme mais la compréhension des astuces que la nature trouve pour résoudre ses problèmes. Le chercheur Frédéric Boyer nourrit ses travaux de cette observation minutieuse. Avec son équipe, il développe divers robots qui ne nécessitent pas le recours au calcul informatique pour acquérir leur autonomie, et qui explorent leur environnement grâce aux particularités de leur corps et à des sens nouveaux comme le sens électrique.
Locomotion : quand la morphologie permet d’éviter le calcul
Robots sous-marins pour exploiter les ressources minières profondes, robots humanoïdes assistant les personnes âgées ou dépendantes, drones grands comme des insectes pour passer inaperçus, tous ont en commun de devoir reproduire des comportements animaux ou humains complexes comme la vision ou la locomotion, et d’agir en toute autonomie avant même d’avoir des comportements que l’on pourrait qualifier d’intelligents, comme prendre des décisions. La recherche en Intelligence Artificielle a longtemps apporté des réponses à ces questions en se laissant guider par ses deux courants principaux, le paradigme symbolique représenté par les systèmes experts, à base de règles et de logique, et le paradigme subsymbolique représenté par l’approche des réseaux de neurones. Mais des observations dans la nature ont montré que le cerveau n’était pas toujours indispensable. Ainsi, même mort, un poisson continue à extraire de l’énergie d’une allée de tourbillons pour avancer, une « nage passive » qui a été modélisée à IMT Atlantique. Faire exécuter à des robots des comportements complexes ne passe donc pas toujours par des calculs informatiques.
On trouve de nombreux physiciens dans la communauté robotique, comme le rappelle Frédéric Boyer, lui-même chercheur et professeur en robotique, et ils ne s’intéressent pas particulièrement au cerveau. « Nous essayons plutôt de ramener des problèmes cognitifs de haut-niveau à des solutions de plus bas niveau, au plus près du corps », ce qui a l’avantage de libérer le cerveau des tâches qu’il n’a pas à traiter, le corps étant adapté à la perception et à l’action. « La robotique bio-inspirée explore un nouveau paradigme pour lever les verrous de l’autonomie, en reconsidérant l’intelligence comme une propriété émergeant des interactions du corps de la machine-animale avec le monde qui l’entoure ; c’est l’intelligence incarnée, la morphologie computationnelle. » L’équipe de l’IRCCyN (Institut de recherche en communication et cybernétique de Nantes) dans laquelle travaille Frédéric Boyer, réalise ainsi dès 2004 un engin sous-marin qui, à la manière d’une anguille, peut se mouvoir dans des environnements marins peu accessibles.
Le chercheur s’intéresse aux problèmes de locomotion dans des milieux très contraints, comme les serpents dans un arbre, ou les vers dans un tuyau. Les applications, encore rares aujourd’hui, pourraient concerner la maintenance dans les pipelines. Plus curieux encore, un robot gibbon, assemblage de bras articulés terminés par des aimants, qui se balance majestueusement comme un pendule jusqu’à lâcher une de ses prises, la projeter plus haut, et grimper ainsi le long d’un mur. Ici l’objectif est de propulser l’engin en allant chercher une partie de l’énergie nécessaire dans son environnement, le mouvement utilisé exploitant au mieux la gravité conçue comme une ressource offerte par le milieu.
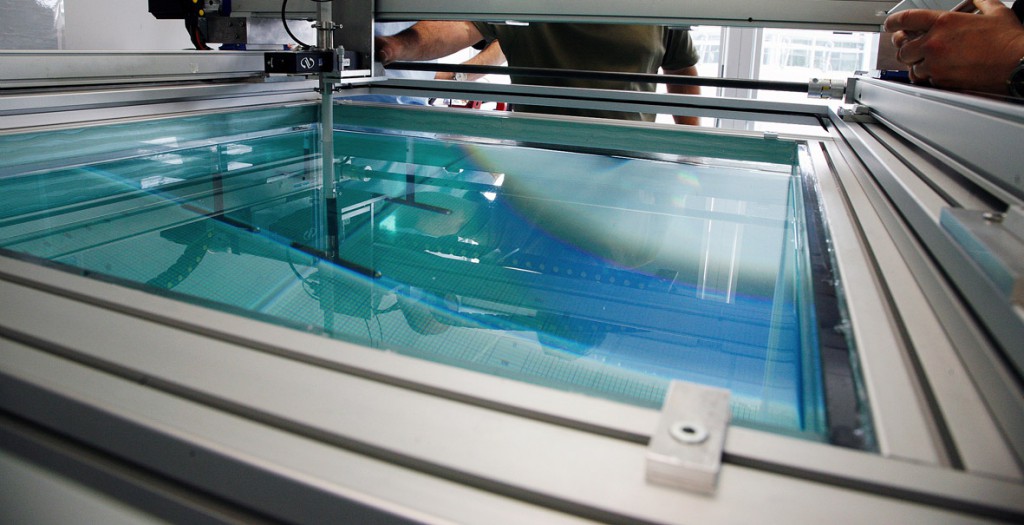
Le sens électrique est étudié dans un bassin, dans lequel une sonde peut se déplacer dans les trois dimensions au sein d’un labyrinthe
La démarche bio-inspirée en trois étapes
On s’est longtemps interrogé sur le vol des insectes, théoriquement impossible si l’on se réfère au vol des oiseaux ou des avions. On a fini par comprendre en l’observant de près que la torsion de l’aile pendant le battement fournissait la portance supplémentaire nécessaire au vol. « Sans ce mécanisme qui exploite la morphologie, cela ne peut pas fonctionner » explique le roboticien, et ceci a ouvert la voie à des drones de la taille des insectes, jusqu’ici impossibles.
« Vous avez un verrou technique ? Pensez bio-inspiration » poursuit le chercheur en citant le cas des robots sous-marins autonomes de petite taille dédiés à la navigation dans des environnements très encombrés, baignés par des eaux troubles. « La nature est une formidable bibliothèque d’inspiration », et la démarche bio-inspirée se déroule « naturellement » en trois étapes. Premièrement, regarder dans la nature, observer le vivant, avec l’aide des biologistes. Cette phase d’observation peut se faire a priori, sans objectif déterminé, car il reste encore beaucoup à apprendre et à inventorier dans la nature. De ces observations, on extrait dans un deuxième temps des fonctions. « On ne copie pas, on comprend. C’est une phase qui repose sur les mathématiques. À ne pas confondre avec de la biomimétique. » précise le chercheur. Car il ne faut pas oublier que la nature n’est pas toujours optimisée, elle reste très redondante et copier avec exactitude pourrait être source d’inefficacité. En revanche, « la nature a trouvé des astuces simples, et la mathématisation du vivant permet d’extraire ces bonnes idées ». La dernière étape de la démarche consiste alors à implémenter ces astuces sur des dispositifs technologiques qui ne sont pas ceux de la nature. Bonus pour les biologistes qui ont participé au début, et avantage de ces échanges pluridisciplinaires, ces implémentations leur permettent souvent de mieux comprendre à leur tour leur propre champ de recherche.
L’exploration systématique de la nature dans le cadre de cette démarche, sans recherche d’application a priori, est d’ailleurs à encourager, explique Frédéric Boyer. On s’aperçoit en effet vite que, « dès qu’on s’intéresse à un animal, un végétal, même l’animal le plus humble, celui qu’on écrase sous le pied, cela pourrait occuper la vie de plusieurs chercheurs » s’enthousiasme cet amoureux de la nature. Jusqu’à envisager la création de nouveaux sens, comme le sens électrique connu de certains poissons qui émettent des champs électriques se déformant au contact des obstacles, ce qu’ils perçoivent grâce à des récepteurs sur leur peau. Cette observation a été utilisée pour permettre au robot Angels, développé dans un projet européen coordonné par Frédéric Boyer, de nager dans l’obscurité, le sens électrique lui créant « comme un corps immatériel ». Ce domaine de recherche nouveau et encore peu exploré intéresse toutefois progressivement les industriels. Le chercheur et son équipe travaillent notamment avec Areva sur la nage dans les boues contaminées et les robots serpents dans les canalisations, et avec le CEA sur la commande télé-opérée par retour électro-haptique. Ils sont également partenaires d’un nouveau projet européen H2020, nommé subCULTron (Submarine cultures perform long-term robotic exploration of unconventional environmental niches), dans le but de réaliser un banc de robots coopératifs sous-marins dotés du sens électrique pour la surveillance des canaux de Venise.
Prochaine étape : sortir dans l’air. Le corps humain est en effet très contrasté par rapport à l’air, en terme de champs électriques. Les recherches sur le robot-anguille et le sens électrique pourraient créer des approches nouvelles et fructueuses autour de la coopération entre les robots et les êtres humains. Et Frédéric Boyer de conclure par une invitation à ses collègues chercheurs conscients de l’importance de la transdisciplinarité : « la bio-inspiration est une manière systématique de « désaxer » sa recherche ».
 Professeur à IMT Atlantique, Frédéric Boyer est un passionné de biologie. Titulaire d’une thèse en robotique de l’université Paris Diderot, il commence par faire « des mathématiques toute la journée en mécanique géométrique pour les structures en grande déformation : les câbles, les robots mous… », puis passe son Habilitation à Diriger les Recherches et se lance dans la robotique bio-inspirée. Le prix Michel Monpetit, lui a été décerné en 2006 par l’Académie des Sciences pour ses travaux en dynamique. Plus récemment, son équipe et lui ont reçu le prix La Recherche 2014 dans la catégorie technologie, pour leur travaux sur le sens électrique. Ces résultats motivent Frédéric Boyer pour faire une recherche encore plus applicative « conciliant mon amour de la nature avec mon activité ». Son équipe collabore avec les autres laboratoires d’IMT Atlantique : Subatech (unité mixte de recherche dans le domaine du nucléaire) pour les capteurs, et le DSEE (Département Systèmes Énergétiques et Environnement) pour la mécanique des fluides, et avec plusieurs laboratoires européens.
Professeur à IMT Atlantique, Frédéric Boyer est un passionné de biologie. Titulaire d’une thèse en robotique de l’université Paris Diderot, il commence par faire « des mathématiques toute la journée en mécanique géométrique pour les structures en grande déformation : les câbles, les robots mous… », puis passe son Habilitation à Diriger les Recherches et se lance dans la robotique bio-inspirée. Le prix Michel Monpetit, lui a été décerné en 2006 par l’Académie des Sciences pour ses travaux en dynamique. Plus récemment, son équipe et lui ont reçu le prix La Recherche 2014 dans la catégorie technologie, pour leur travaux sur le sens électrique. Ces résultats motivent Frédéric Boyer pour faire une recherche encore plus applicative « conciliant mon amour de la nature avec mon activité ». Son équipe collabore avec les autres laboratoires d’IMT Atlantique : Subatech (unité mixte de recherche dans le domaine du nucléaire) pour les capteurs, et le DSEE (Département Systèmes Énergétiques et Environnement) pour la mécanique des fluides, et avec plusieurs laboratoires européens.Rédaction : Nereÿs
Retrouvez ici tous les articles de la série « Carnets de labos »










« la nature n’est pas toujours optimisée, elle reste très redondante et copier avec exactitude pourrait être source d’inefficacité. » Ceci est vrai sur le court terme. Mais à l’observer on comprends aussi que ses redondances sont un atout sur le long terme.
Dans notre vision court-terme du monde, la règle est l’efficience et l’efficacité. Mais dans une vision soutenable et pérenne du monde, qu’on pourrait rêver d’avoir, l’inefficacité à bien des atouts, en particulier la résilience et l’adaptabilité ( multi-fonctionnalité, temps libre pour apprentissages….). Donc la nature n’est jamais inefficace. Seule notre perception incomplète lui donne cet aspect.