Robots déformables : « une autre conception de la robotique »
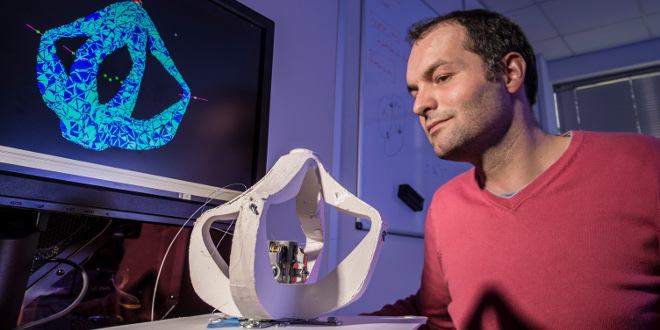
 Christian Duriez est chercheur à l’Inria sur des robots d’un nouveau genre : les robots déformables. En basant leur mouvement sur la déformation de leur structure et le contact avec leur environnement, ces automates pourraient bien incarner la robotique de demain. Mais ils constituent un véritable challenge pour les roboticiens, car ils poussent les algorithmes de simulation et de pilotage dans leurs retranchements. Le 22 mars prochain, à l’occasion de la Bourse aux technologies de l’Institut Mines-Télécom qui se tiendra au ministère de l’Économie, de l’industrie et du numérique, Christian Duriez présentera un modèle de robot déformable à Bercy.
Christian Duriez est chercheur à l’Inria sur des robots d’un nouveau genre : les robots déformables. En basant leur mouvement sur la déformation de leur structure et le contact avec leur environnement, ces automates pourraient bien incarner la robotique de demain. Mais ils constituent un véritable challenge pour les roboticiens, car ils poussent les algorithmes de simulation et de pilotage dans leurs retranchements. Le 22 mars prochain, à l’occasion de la Bourse aux technologies de l’Institut Mines-Télécom qui se tiendra au ministère de l’Économie, de l’industrie et du numérique, Christian Duriez présentera un modèle de robot déformable à Bercy.
« Dessine-moi un robot » pourrait demander un Petit Prince 2.0 à Christian Duriez. Non pas que ce chercheur de l’Inria ait des dons particuliers en dessin, mais parce que le croquis pourrait bien en surprendre plus d’un. Bien loin de l’imaginaire collectif des androïdes du cinéma, Christian Duriez travaille en effet sur un genre d’automates particulier : des robots déformables. Contrairement aux robots classiques, ceux-ci ne basent pas leur mouvement sur des mécanismes d’articulations, mais sur la la déformation de leur structure. « Le mouvement des robots déformables est très inspiré de la nature, les invertébrés se déplacent par exemple sans structure osseuse » explique le chercheur. Il en résulte des automates aux formes atypiques, comme un bras manipulateur ressemblant à un accordéon cylindrique. Le 22 mars prochain, à l’occasion de la Bourse aux Technologies, Christian Duriez présentera un petit robot à six pattes rappelant un insecte, à ses homologues chercheurs et aux PME.
Pour réaliser ces machines, les chercheurs utilisent des « matériaux à l’image du silicone ou d’autres polymères élastiques », comme l’indique le roboticien. Ces constituants du corps du robot sont ensuite déformés par l’action de moteurs ou de câbles tirant sur la matière pour modifier la structure du robot et le faire bouger. Dans le domaine, des projets plus exotiques voient même le jour, exploitant des matériaux à mémoire de forme ou des actionneurs pneumatiques. « La robotique déformable est en fait un sujet assez grand, à la mode » nous confie Christian Duriez. Tellement large d’ailleurs que de nombreuses compétences entrent en jeu. Le chercheur complète ainsi : « Nous avons un angle très particulier qui est de s’intéresser à la partie logicielle de ces robots ».
Et ce n’est pas une mince affaire ! Car développer des algorithmes de pilotage et de modélisation des mouvements d’un robot déformable relève d’une complexité certaine. Dans le cas des machines articulées classiques, la position de l’ensemble de la structure peut être déduite de celle de chacune des articulations et de la géométrie générale. Ce n’est pas aussi simple pour un robot déformable : « sa position va dépendre des propriétés mécaniques des matériaux qui le constituent » détaille Christian Duriez. Les scientifiques doivent donc développer des modèles mathématiques capables de tenir compte de ces variables.
Ce domaine de la physique est gouverné par la théorie des milieux continus, une branche de la mécanique faisant entrer en jeu de lourds calculs aux dérivées partielles pour rendre compte des nombreux paramètres impliqués. Afin de les résoudre, Christian Duriez et son équipe ont recours à la méthode des éléments finis. Cette technique de résolution n’a rien de nouveau pour les experts en mécanique numérique. Le roboticien de l’Inria en atteste même : « C’est une méthode très connue pour le calcul de structures : les ingénieurs lancent une simulation qui tourne pendant des heures, observent le résultat à la fin et corrigent la structure en fonction ».
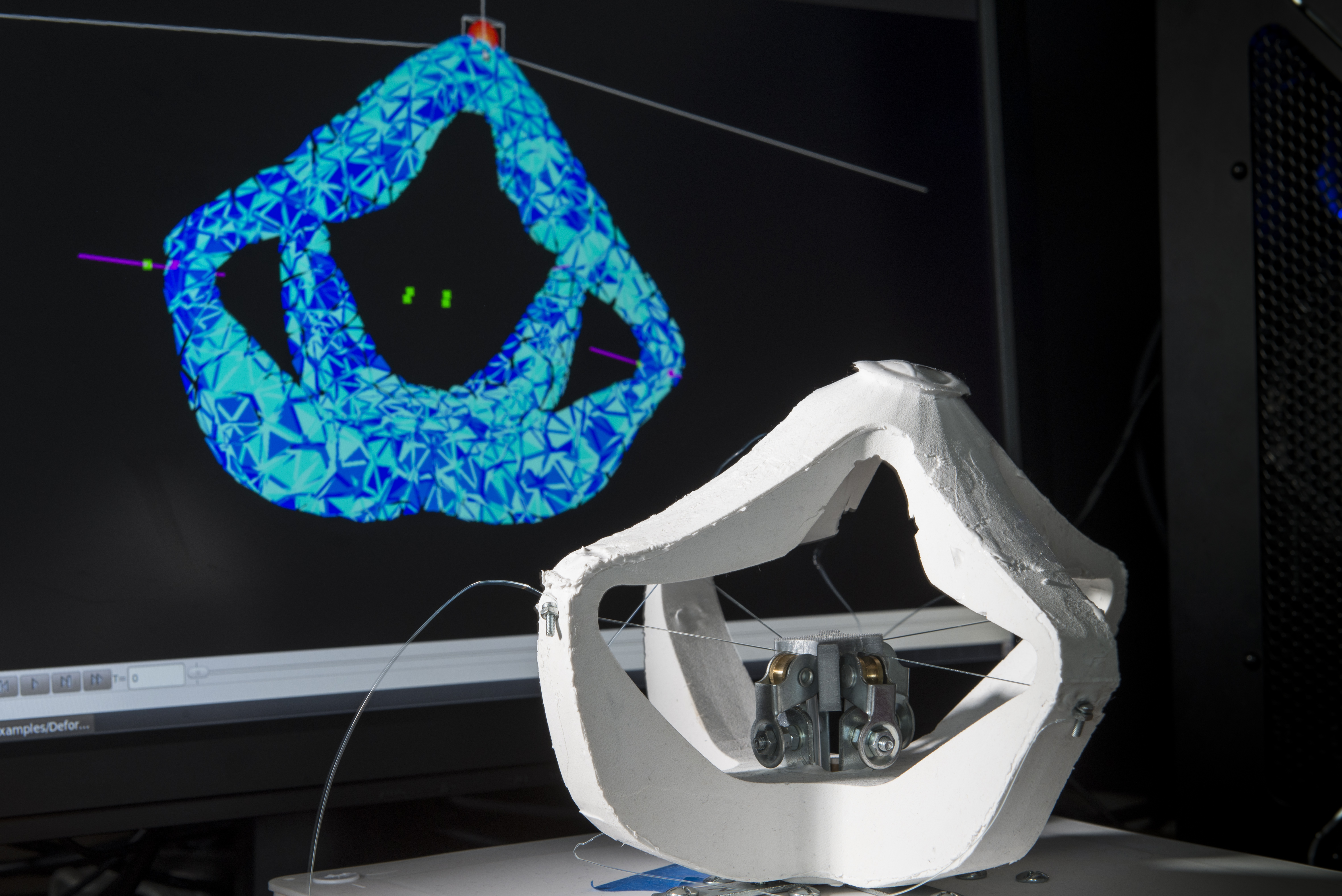
Robot mou, en silicone, animé via câbles et servo-moteur. Les déformations du robot sont modélisées en temps réel selon la méthode des éléments finis (FEM model). À lécran : simulation numérique par maillage tétraédrique du robot déformable. © Inria / Photo H. Raguet.
Les robots déformables mettent les algorithmes à l’épreuve
Mais dans le cas des robots déformables, les calculs ne peuvent pas durer plusieurs heures : le robot doit bouger rapidement. « C’est là qu’est notre compétence, puisque nous utilisons la méthode des éléments finis pour faire des calculs en temps réel » confie Christian Duriez. Sur des temps très courts, les algorithmes ainsi développés permettent donc de prendre en charge les multiples variables. Pour l’instant, « les robots ne bougent pas très vite » concède le chercheur, car cela demande encore un certain délai de calcul pour tenir compte du nombre quasi-infini de degrés de liberté de la machine et des déformations induites par contact avec l’environnement. Entre deux mises à jour de simulation, c’est à dire sur une durée de quelques millisecondes, la déformation doit rester petite. Un changement de position plus large — et donc plus rapide — est envisagé mais demande encore une optimisation des algorithmes. « Nous ne savons pas encore gérer les mouvements plus rapides : si le robot bouge trop vite, nos algorithmes ne savent plus tenir compte des aspects inertiels et la simulation devient trop complexe » avoue Christian Duriez.
Une autre difficulté technologique pour le développement des robots déformables vient de la philosophie même de leur fonctionnement. Alors que les machines classiques cherchent à éviter la collision, synonyme d’endommagement, les robots déformables utilisent à leur avantage le contact avec leur environnement. Mais cela se traduit à nouveau par un challenge dans la modélisation, car l’environnement déforme lui aussi le robot. Pour résoudre ce problème, les chercheurs de l’Inria peuvent cependant compter sur leur expérience et leurs travaux passés. « Nous profitons de nos recherches précédentes en simulation chirurgicale, nous avions alors travaillé sur la modélisation du contact entre les instruments et les organes » raconte Christian Duriez.
Le domaine de la médecine, et en particulier de la chirurgie, est d’ailleurs particulièrement intéressé par ce type de recherche sur les robots déformables. Ceux-ci pourraient par exemple offrir la possibilité d’opérer en abîmant au minimum les parois des patients. Ils constitueraient également une aide potentielle à la rééducation, par le biais de vêtements robotisés. Cependant, pour Christian Duriez, les robots déformables font plus que répondre à des besoins de niche dans lesquels les robots rigides sont limités. Pour le chercheur, « c’est surtout une autre conception de la robotique, une nouvelle façon de créer des robots ». Toutes les applications actuelles des automates pourraient donc tout à fait être viables pour des robots déformables. Christian Duriez aime se justifier en prenant l’exemple d’une des premières technologies : « J’entends souvent qu’il ne faut pas réinventer la roue. Mais en comparant ce qu’était la roue à ses débuts, et ce qu’elle est aujourd’hui, il y a énormément de différences ». Alors, si l’Humanité a su réinventer la roue, pourquoi ne pourrait-elle pas réinventer le robot ? Encore faudra-t-il expliquer à notre Petit Prince 2.0 ce que signifie « réinventer ».
[box type= »shadow » align= »aligncenter » class= » » width= »95% »]
Le concept de la Bourse aux technologies
La Bourse aux technologies de l’Institut Mines-Télécom est une journée de rencontres et d’échanges entre chercheurs et PME. L’objectif du dispositif est de permettre aux entreprises d’accéder plus facilement aux résultats de la recherche académique et de développer ainsi les innovations de demain. Son originalité est d’apporter les technologies issues de toutes les écoles de l’Institut Mines-Télécom et de ses partenaires, dans une région donnée et sur un domaine. Ces rendez-vous s’inscrivent dans le cadre du programme de promotion de l’offre des technologies des organismes publics de la recherche mis en œuvre par le Consortium de Valorisation Thématique CVSTENE (Investissements d’Avenir) dédié aux sciences et technologies du numérique.
En savoir + sur la Bourse aux technologies « Smart manufacturing » du 22 mars
En savoir + sur le programme de cette journée
[/box]










Trackbacks (rétroliens) & Pingbacks
[…] En savoir + […]
[…] Sourced through Scoop.it from: imtech.imt.fr […]
Laisser un commentaire
Rejoindre la discussion?N’hésitez pas à contribuer !